













 Marcy's Musings: The Growing Industry
Marcy's Musings: The Growing Industry It’s Only Common Sense: Here’s What To Do After IPC APEX EXPO 2024
It’s Only Common Sense: Here’s What To Do After IPC APEX EXPO 2024 Dan’s Biz Bookshelf: Seeing the How
Dan’s Biz Bookshelf: Seeing the HowTactile Sensor for Robot Skin Advanced by KAIST Team
April 17, 2017 | KAISTEstimated reading time: 2 minutes
The joint research team of Professors Jung Kim and Inkyu Park from the Department of Mechanical Engineering developed a tactile sensor that can act as skin for robots using silicon and carbon materials. This technology produced a sensor that can absorb shock and distinguish various forms of touch, and it is hoped to be used as robot skin in the future.
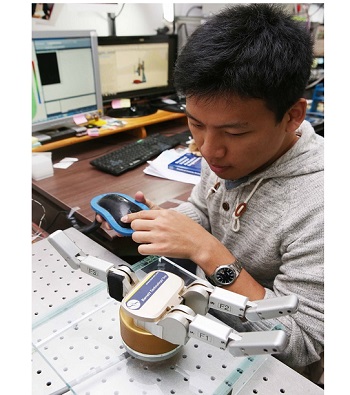
Fiigrue 1: Robotic hand responding to resistance via a connection with the developed tactile sensor
Skin serves an important role as the largest organ of the human body. As well as protecting major organs from external shock, skin also measures and distinguishes delicate tactile information and transfer it to the nervous system.
Current robotic sensory technology allows robots to have visual and auditory systems at nearly similar levels to human capacity, but there are limitations in tactile sensors that can detect changes in the environment throughout the body. To apply skin with similar functions as humans to robots, it is essential to develop skin sensor technology with high flexibility and high shock absorption. Another limitation for developing robot skin was connecting numerous sensors all over the body using electric wiring.
To overcome this problem, the research team combined silicon and carbon nanotubes (CNT) to produce a composite, which was then used in combination with a medical imaging technique called electrical impedance tomography (EIT). This led to technology that can distinguish various forms of force over a large area without electrical wiring.
The sensing material can distinguish the location and the size of various forms by touch, and thus can be applied to robot skin that can absorb shock as well as serves as a 3D computer interface and tactile sensor. It can withstand strong force such as a hammer strike, and can be re-used even after partial damage to the sensor by filling and hardening the damaged region with composite. Further, the sensor can be made by filling a 3D shape frame with silicon-nanotube composite. Since various 3D curved surfaces, as well as traditional 2D flat surfaces, can be produced, new forms of computer interfaces can be developed.
This research was conducted through a collaboration between Professor Park, an expert in nanostructures and sensors, and Professor Kim, an expert in bio-robotics. Hence, the technology is likely to be applied in real products.
Professor Kim said, “Flexible tactile sensors can not only be directly adhered to the body, but they also provides information on modified states in multiple dimensions”. He continued, “This technology will contribute to the soft robot industry in the areas of robot skin and the field of wearable medical appliances.”
Professor Park said, “This technology implemented a next-generation user interface through the integration of functional nano-composite material and computer tomography.”
This research was published in “Scientific Report,” a sister journal of Nature, online on January 25. This research was conducted as joint research by first author Hyo-Sang Lee, as well as Donguk Kwon and Ji-seung Cho, and was funded by the Ministry of Science, ICT and Future Planning.
Figure 2: Manufacturing process for pressure-resistant composite using silicon rubber and carbon nanotubes
Figure 3: Computer interface using pressure-resistant composite
Share on:




Suggested Items
Ansys Joins BAE Systems’ Mission Advantage Program to Advance Digital Engineering Across US Department of Defense
04/16/2024 | ANSYSAnsys announced it is working with BAE Systems, Inc., to accelerate the adoption of digital engineering and MBSE across the Department of Defense (DoD).
Microchip Technology Acquires Neuronix AI Labs
04/16/2024 | Microchip Technology Inc.Innovative technology enhances AI-enabled intelligent edge solutions and increases neural networking capabilities.
Incap Estonia Teamed Up With Solaride to Fuel Youth Excitement for The World of Engineering
04/11/2024 | IncapIncap Estonia partnered with Solaride to ignite enthusiasm among young people for the world of engineering and sustainable technology. Together, they organised an inspiring day for students from grades 7 through 12 in Saaremaa. Held at Incap’s Kuressaare factory, this event brought together over 130 young minds eager to explore the innovative world of technology and learn more about advanced electronics manufacturing.
Plastronics and the New IPC Guidelines for In-mold Electronics (IME)
04/11/2024 | Barry Matties, I-Connect007In the ever-evolving world of electronics, the roads for the integration of electronics assemblies into 3D structures continue to grow into a set of technologies used to produce 3D plastronics parts and revolutionize mainly the automotive industry. IPC has been developing standards for this set of technologies, led by Francisco Fourcade, IPC electronics technology standards manager.
MacroFab Announces Addition of Gordon Rapkin to Board of Directors
04/10/2024 | PRNewswireMacroFab Inc., the operator of North America's largest technology platform for electronics manufacturing, has announced today the appointment of Gordon Rapkin to its Board of Directors as Chairman.