













 Happy’s Tech Talk #28: The Power Mesh Architecture for PCBs
Happy’s Tech Talk #28: The Power Mesh Architecture for PCBs It’s Only Common Sense: Would You Join Your Own Company?
It’s Only Common Sense: Would You Join Your Own Company? The Chemical Connection: Reducing Etch System Water Usage, Part 2
The Chemical Connection: Reducing Etch System Water Usage, Part 2NUS-developed Manta Ray Robot Swims Faster and Operates Up to 10 Hours
November 13, 2017 | NUSEstimated reading time: 2 minutes
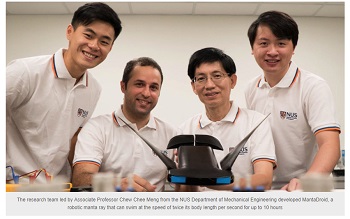
Researchers from the National University of Singapore (NUS) have created MantaDroid, an aquatic robot that emulates the swimming locomotion of manta rays. The robotic manta ray, which swims at the speed of twice its body length per second and can operate for up to 10 hours, could potentially be employed for underwater surveillance in future.
Manta rays are considered one of nature’s most graceful and efficient swimmers. Unlike most underwater species, manta rays possess a unique propulsion mechanism that enables them to cruise through turbulent seas by flapping their pectoral fins effortlessly. This distinctive feature has sparked great interests in understanding the science behind the mechanism and to incorporate similar mechanisms into autonomous underwater vehicles (AUVs).
Motivated to develop a bio-inspired AUV, a research team led by Associate Professor Chew Chee Meng and Associate Professor Yeo Khoon Seng from the Department of Mechanical Engineering at NUS Faculty of Engineering developed MantaDroid, which resembles a juvenile manta ray. Measuring 35cm in length, 63cm in width and weighing only 0.7kg, MantaDroid can swim at a speed of 0.7m per second, which is twice its body length, for up to 10 hours.
MantaDroid was designed and optimised over two years after an in-depth study of fluid dynamics and multiple experiments which included testing of 40 different fin designs. The fins that were eventually installed on the robot are a pair of flexible pectoral fins made using PVC sheets. The fins achieved good manoeuvrability and swimming capability when tested in the pool.
“Unlike other flapping-based underwater robots that replicate manta ray’s flapping kinematics by using multiple motors to achieve active actuations throughout the fins, MantaDroid is powered by only one electric motor on each fin. We then let the passive flexibility of the fins interact naturally with the fluid dynamics of the water to propel the subsequent motions,” explained Assoc Prof Chew.
MantaDroid makes a promising alternative to traditional propeller-based thrusters used in conventional AUVs, and could potentially operate for a longer range. Like the real manta ray, MantaDroid also has a flat and wide body that can accommodate a range of sensors and be utilised for different purposes such as studying marine biodiversity, measuring hydrographic data and performing search operations.
The NUS team will be testing MantaDroid in sea environment next, to investigate its swimming capability at different depths and its ability to withstand underwater current. The team is also working to incorporate more modes of movement in the robot’s fin mechanism.
Share on:




Suggested Items
Connect the Dots: Best Practices for Prototyping
09/21/2023 | Matt Stevenson -- Column: Connect the DotsPCB prototyping is a critical juncture during an electronic device’s journey from concept to reality. Regardless of a project’s complexity, the process of transforming a design into a working board is often enlightening in terms of how a design can be improved before a PCB is ready for full production.
The Drive Toward UHDI and Substrates
09/20/2023 | I-Connect007 Editorial TeamPanasonic’s Darren Hitchcock spoke with the I-Connect007 Editorial Team on the complexities of moving toward ultra HDI manufacturing. As we learn in this conversation, the number of shifting constraints relative to traditional PCB fabrication is quite large and can sometimes conflict with each other.
Asia/Pacific AI Spending Surge to Reach a Projected $78 Billion by 2027
09/19/2023 | IDCAsia/Pacific spending on Artificial Intelligence (AI) ), including software, services, and hardware for AI-centric systems will grow to $78.4 billion in 2027, according to International Data Corporation's latest Worldwide Artificial Intelligence Spending Guide.
Intel to Sell Minority Stake in IMS Nanofabrication Business to TSMC
09/13/2023 | IntelIntel Corporation announced that it has agreed to sell an approximately 10% stake in the IMS Nanofabrication business to TSMC. TSMC’s investment values IMS at approximately $4.3 billion, consistent with the valuation of the recent stake sale to Bain Capital Special Situations.
RAF Invests in BAE Systems’ Most Advanced Fighter Pilot Helmet
09/13/2023 | BAE SystemsThe UK Ministry of Defence (MOD) has awarded BAE Systems a contract to develop its Striker II Helmet Mounted Display (HMD) for the Royal Air Force (RAF) Typhoon fleet. The contract, valued at £40m, will create and sustain more than 200 highly-skilled jobs at BAE Systems’ sites in Kent and Lancashire working directly on the Striker II programme. In total, the Typhoon programme sustains more than 20,800 jobs across the UK.