












 The Right Approach: I Hear the Train A Comin'
The Right Approach: I Hear the Train A Comin' It’s Only Common Sense: OCCAM—the Time Is Now
It’s Only Common Sense: OCCAM—the Time Is Now Marcy's Musings: The Growing Industry
Marcy's Musings: The Growing IndustryAugmented Reality Takes 3-D Printing to Next Level
February 23, 2018 | Cornell UniversityEstimated reading time: 1 minute
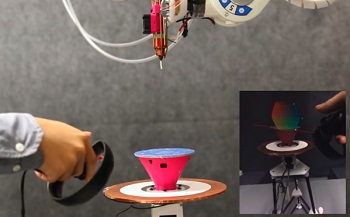
Cornell researchers are taking 3-D printing and 3-D modeling to a new level by using augmented reality (AR) to allow designers to design in physical space while a robotic arm rapidly prints the work.
“Instead of designing 3-D models on the computer screen, we wanted to give users the opportunity to work in conjunction with the robot. We call it in-situ fabrication,” said Huaishu Peng, Cornell information science doctoral student.
To use the Robotic Modeling Assistant (RoMA), a designer wears an AR headset with hand controllers. As soon as a design feature is completed, the robotic arm prints the new feature.
“The cool thing is that the robot can print the users’ design at the same time and place. The designer has this tangible feedback early in the design phase and can make adjustments,” said Peng. “The combination of AR and robot allows the designer to use the just-printed part to design their next features. The designer can even directly design and print on an existing physical object. This tightens the process between design and fabrication.”
The researchers have developed an interactive technique that allows the robot and the designer to work together – knowing to print in the back of the object if the designer is working in the front and also automatically re-computing the changes being made in real time.
“In the future, we expect a robotic arm can be an intelligent design assistant,” said Peng. “There is a very promising future for the combination of augmented reality and 3-D printing – for example, for making furniture and other fast printed physical items in a real environment.”
Peng and his collaborators – computer science master’s student Jimmy Briggs; computer science doctoral student Cheng-Yao Wang; Francois Guimbretiere, professor of information science; Joseph Kider, University of Central Florida; Stefanie Mueller, Massachusetts Institute of Technology; and Patrick Baudisch, Hasso Plattner Institute, Germany – will present their paper on RoMA at the Human Computer Interaction conference in April.
Share on:




Suggested Items
iNEMI Packaging Tech Topic Series: Role of EDA in Advanced Semiconductor Packaging
04/26/2024 | iNEMIAdvanced semiconductor packaging with heterogenous integration has made on-package integration of multiple chips a crucial part of finding alternatives to transistor scaling. Historically, EDA tools for front-end and back-end design have evolved separately; however, design complexity and the increased number of die-to-die or die-to-substrate interconnections has led to the need for EDA tools that can support integration of overall design planning, implementation, and system analysis in a single cockpit.
Cadence, TSMC Collaborate on Wide-Ranging Innovations to Transform System and Semiconductor Design
04/25/2024 | Cadence Design SystemsCadence Design Systems, Inc. and TSMC have extended their longstanding collaboration by announcing a broad range of innovative technology advancements to accelerate design, including developments ranging from 3D-IC and advanced process nodes to design IP and photonics.
Ansys, TSMC Enable a Multiphysics Platform for Optics and Photonics, Addressing Needs of AI, HPC Silicon Systems
04/25/2024 | PRNewswireAnsys announced a collaboration with TSMC on multiphysics software for TSMC's Compact Universal Photonic Engines (COUPE). COUPE is a cutting-edge Silicon Photonics (SiPh) integration system and Co-Packaged Optics platform that mitigates coupling loss while significantly accelerating chip-to-chip and machine-to-machine communication.
Siemens’ Breakthrough Veloce CS Transforms Emulation and Prototyping with Three Novel Products
04/24/2024 | Siemens Digital Industries SoftwareSiemens Digital Industries Software launched the Veloce™ CS hardware-assisted verification and validation system. In a first for the EDA (Electronic Design Automation) industry, Veloce CS incorporates hardware emulation, enterprise prototyping and software prototyping and is built on two highly advanced integrated circuits (ICs) – Siemens’ new, purpose-built Crystal accelerator chip for emulation and the AMD Versal™ Premium VP1902 FPGA adaptive SoC (System-on-a-chip) for enterprise and software prototyping.
Listen Up! The Intricacies of PCB Drilling Detailed in New Podcast Episode
04/25/2024 | I-Connect007In episode 5 of the podcast series, On the Line With: Designing for Reality, Nolan Johnson and Matt Stevenson continue down the manufacturing process, this time focusing on the post-lamination drilling process for PCBs. Matt and Nolan delve into the intricacies of the PCB drilling process, highlighting the importance of hole quality, drill parameters, and design optimization to ensure smooth manufacturing. The conversation covers topics such as drill bit sizes, aspect ratios, vias, challenges in drilling, and ways to enhance efficiency in the drilling department.